After spending last week observing and supporting Team Condor (Colombia) in the UAV Outback Challenge in Queensland Australia, it was clear to me that there was some common themes that emerged from the four successful teams.
As regular readers will recall, I spent the first 9 years of my working life working on Helicopters for the Royal Australian Navy on an operational squadron, so I know a fair bit about operating aircraft in the real world (admittedly a long time ago).
I met most of the teams over dinner before the Challenges and sat down with the successful teams and picked their brains after winning. Observing the less successful teams also gave me a view about what not to do and areas of improvement.
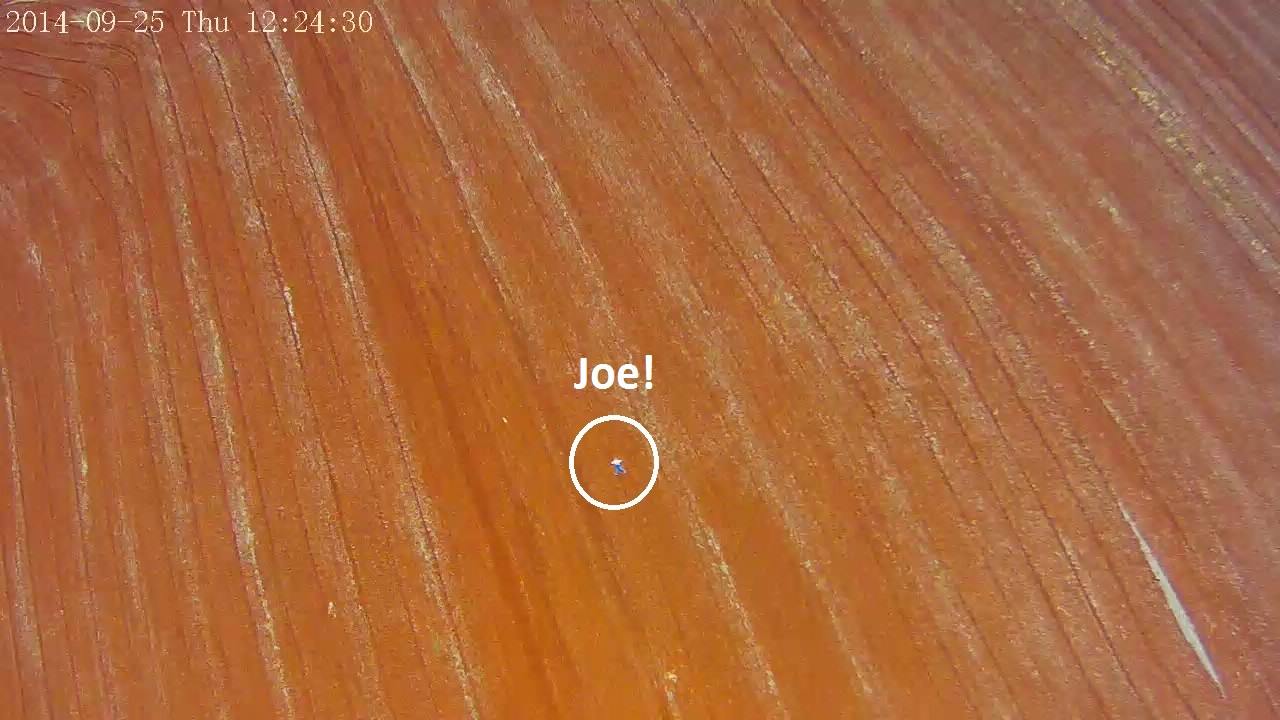
A recap on the challenge to find Outback Joe and drop him a bottle of water
This was a CASA sanctioned event on a public airport flying which was being used during the competition with flights over populated farmland so naturally there were a lot of rules, initially they seemed excessive, in hindsight essential.
The first thing to say is that this was a difficult challenge, its been the first time its been achieved.
You think it shouldn’t be that hard, Hollywood makes us believe an 8 year old can put together a UAV and fly it cross country but it really is a difficult problem or in fact a collection of difficult problems flying in formation.
Essentially you have to solve problems involving aeronautics , avionics, telemetry, radio, battery or petrol power, video transmission, computer vision and navigation.
In most cases successful operation involved successful integration of multiple disparate embedded microcontroller systems, servo’s, mobile and desktop computing, radio, RF signal tuning, WIFI, 4G & GPS as well as being able to build, maintain and operate the aircraft and then pilot it.
When you opened them up most of the aircraft looked like the inside of a computer.
These are all problems aircraft and component manufacturers have been working on for 80 years and the components to enable this is only just starting to make its way into products which are suitable in size and cost for hobbyists and hackers.
Observing the operations of most of the crews I can tell you that this is not mainstream, it is not operationally ready for the real world.
Don’t expect your Amazon deliveries, Beer or Pizza via drone anytime soon.
Before I observed the Outback Challenge, I was much the same, how hard could it be? Launch the aircraft, draw a few waypoints on the autopilot screen, press the button to drop and you are home in time for a few beers.
But the fact that arguably some of the best non military drone guys in the world couldn’t manage to fly at the same level of operational capability or safety of your average crop duster or Cessna pilot tells you that drones or UAVs are not ready for widespread commercial adoption.
There is just too much that can go wrong and the airframes or avionics packages are not professional enough nor is there the operational flight systems in place, think control towers, IFF, radar and some method of controlling their flight plan in a way they don’t fly into each other, humans, buildings or aircraft. (this is a huge potential issue for hobbyists, its only going to take a few aircraft vs UAV/Piloted RC Aircraft incidents and national aviation authorities may ban UAV operations)
So what lessons can we learn from the winners?
In my opinion the teams that were successful won the competition before they got to the airfield.
The overall winners Canberra UAV took home the major $50,000 prize. I sat down with Andrew Tridgell one of the key team members (and inventor of the SAMBA file system and Open Source Legend) and a major contributor to the APM autopilot software that the majority of the competitors used.
The Canberra Team told me prior to the event that they had already flown a replica of the mission successfully numerous times and had found Joe in practice a number of times.
When I asked Andrew afterwards he went into detail, they had run up at least 25 complete fully automated test flights to test all of the components outside Canberra using safety pilots & observers on hills to ensure they stayed within CASA regulations and run countless part tests.
They had tested the two stage bottle release until it was functioning perfectly (it releases the back of the bottle and then streams the parachute before realising this as well).
Most of the teams I spoke to were lucky to have run a few full tests of all systems at once.
Most of the testing I saw was one system at a time ie autopilot now, then camera, then mission planner, etc, very few I spoke to did anywhere the amount of testing these guys did.
Canberra didn’t have the sexiest airframe (Poland took this out with Singapore a close second) but they deserved to win, aside from the fact that Andrew Tridgell was actually running around helping all the other teams during the week with any issues they had on the APM:Plane software including releasing code updates during the competition to help some of the teams, in my opinion they had a level of testing, operations and professionalism well above the rest of the teams.
They also had backup plans laid out for just about every problem they thought they would experience.
They had failsafe flight controllers/Autopilot computers, backup comms links, automatic restart if they lost power.
Above all they had dogged relentless determination to get across the line. The problems they experienced during the lead up would have killed most teams.
Admittedly they had Andrew working part time on the challenge for the better part of a year and financial and technical help from the leaders in the space 3D Robotics, they were far better resourced than almost all of the competitors, though reportedly the Polish team had a much bigger budget and their aircraft showed it.
They did make some mistakes, as mentioned the wind was gusting 15-20 kn when they took off. The only problem was they couldn’t tell that in the blackout operations tent that they set the flight and navigation team up in and it wasn’t passed back from their ground crew (yep it looked like a real military operation).
So when the aircraft took off it was blown off course straight towards the competition tent and the team almost had to abort the mission.
One small operational detail almost derailed them….
Antonio Liska led this team. Overall the aircraft was pretty small and plain but this is a common theme, the successful guys put their efforts into the flight control systems, not the airframes.
Antonio is selling 1-2
They managed Auto take off and land and found Joe in 12 min which is very fast. They loitered for 10 m and dropped the bottle.
Due to the nature of his business they had a of practice.
I think the key thing about Robota aside from good airframe and avionics was strict discipline around checklists.
Checklists changed the face of aviation in the early days. Its hard to imagine but they Checklists were not compulsory on aircraft originally.
It wasnt until the 1935 crash of a Boeing B17 Prototype that Boeing introduced preflight and landing checklists and they became common practice.
Robota had a checklist of checklists, these are the ones I remember
I saw a lot of mistakes from other teams that were absolutely avoidable using either daily inspections (DIs as we used to call them), pre flight (maintenance) or pre takeoff (pilot) inspections or checklists.
When I asked them about their success they put it down to simplicity and luck. They went with a very simple cheap airframe (it was so unexciting I didn’t originally take a photo of it) they only had about 10 hours full autopilot flight and had found Joe in practice.
They had a re-inforced bottle which meant that they didn’t need a complicated parachute release system.
The most impressive airframes Singapore and Poland really didn’t rate. They both looked like they were hijacked from their respective countries Airforces, truly impressive entries for non commercial teams.
An aside apparently Singapore forbids the use of petrol powered remote aircraft and had very limited airspace in which to fly basically he had less than a football field to practice in and the aircraft spent its entire test time in a loop.
But in the end the airframe really wasn’t the critical problem.
As long as it could fly for an hour and could carry the combined payload of avionics and the bottle of water the airframe didn’t make a lot of difference to the result. Two of the winners used foam kit planes that cost under $200.
They needed to be robust enough to land and not break up (some of them had parachutes which looks fantastic when deployed), handle strong winds and stay in the air for an hour and that was about it.
The thing that impressed me and the area where SFWA didn’t skimp was avionics. Daniel is a embedded hardware engineer and Ben runs an enterprise email marketing company that sends over a billion emails a year.
They created their own custom flight controller board using a Texas Instruments DSP chip with a custom two board design and an ARM Xenix 4512 quad core chip for image processing
They wrote their own custom autopilot software as they felt the APM software didn’t have a great track record with a light aircraft in strong winds (which is definitely what they got).
In hindsight Ben said they would now just use APM and integrate some of their own algorithms.
It impressed me that so many of the teams had designed their own custom boards to give them the functionality and then had these professionally manufactured.
Some of the boards had sophisticated failover systems that could handle battery and battery cell failure, dual autopilot processors that would fail over if the primary failed
My sense was that there was good business opportunity for some of these teams to start producing what they had built.
Peter Wlodarczyk from Team Thunder is an engineering manager at Resmed. He managed to pull his team together over the last year but recognised very early that none of the team members had much time and very little experience. All of the guys had young families which made practice time extremely difficult
I met Peter for the first time the week before the Challenge at our local model airfield in the Hawkesbury district in Sydney, initially they looked impressive but we pretty quickly realised that they had similar issues with operational experience that the Team Condor guys I was supporting had.
By his own admission they didn’t have much experience in any of the challenges aspects of the competition. They had to pick the battles to fight.
Their solution was to use as much pre made software and hardware as they could and a simple robust airframe and focus on the programming of the system and getting the operations right.
In hindsight he would have spent a lot more time on the simulator to compensate for the lack of operational flight time.
They crashed 5-6 times and went through a few airframe parts, but had spares.
They only managed to test completely 4 times before the competition.
A common thing I saw from some of the competitors was crappy airmanship when it came to the presentation and operation of the aircraft.
Here is a few things I saw that need to be improved.
Ships and Aircraft have a clearly identified captain for a reason. When it all goes to shit it needs to be clear who owns the situation and has authority and capability to resolve it.
When decisions have to be made it is clear who needs to make them. The buck has to stop somewhere.
Someone must be watching and controlling the operations of the team members and the work and problems of the various different disparate components that make up an aircraft.
I saw a number of teams really struggling with this concept, it wasn’t clear who was in charge or deliberately no one was and duties and responsibilities were not clearly defined.
When something went wrong it wasn’t clear who owned the problem.
Many of these teams were working into the night during the week trying to resolve problems, I believe a little more leadership up front might have prevented these last minute sessions.
It was clear to me that the successful teams knew who was in charge. It might be a different person for ground maintenance to flying operations but it was very clear.
I had discussions over beers with some of the successful team leaders, who realised they had a problem early on and despite not officially being team managers were taking the role and pushing their teams along even though in some cases it was causing friction.
Other teams were more democratic and less successful.
In my opinion you do need to select a team manager who is responsible for organising all of the other team members and their work and operation of the aircraft even if that means their job is primarily organising and leading and not much actual hands on work.
I think the guys in the Compass team despite not being successful in finding Joe seemed to have a really good handle on this, they managed to mount this challenge despite their team members being spread out between Brisbane, Sydney and Melbourne and the leader basically chased them for deliverables each and every week, organised frequent and regular practice, built a sophisticated custom flight system and put together a great challenge.
I hope this has helped you in your quest to mount either the next UAV Outback Challenge or some other UAV competition.
DM Tracker - Catch every Instagram lead, surface follow-ups, know what converts
whacka - Whacka converts a text prompt into an installable mobile web app (PWA) that…
Tokens Forge - Low-cost AI model tokens, one OpenAI-compatible API, and AI Researcher reports.
Sochely - Create, Share, and Fill Events Faster with AI-Powered Invitations & RSVPs
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}