
Pitch your Startup, App or Hardware or post a Startup Event or Startup Job
The Problem:
The most viable UAV airframe for delivering stuff or doing anything useful around the city, Search & Rescue, Surveying, Short Range Monitoring or Agtech is a Quadcopter.
The Quadcopter is a viable way to carry a decent payload without the spectre of an pilotless helicopter with a 1-2m blade spinning around the city uncontrolled.
Single Rotor Helicopters are a more efficient design than Quadcopter’s and get the advantage of more efficient lift from both their rotary and their forward motion through the air.
The advancing and retreating blades change pitch as they rotate using what is known as a Swash plate which is also what controls the collective and cyclic tilting of the blades for height and directional motion.
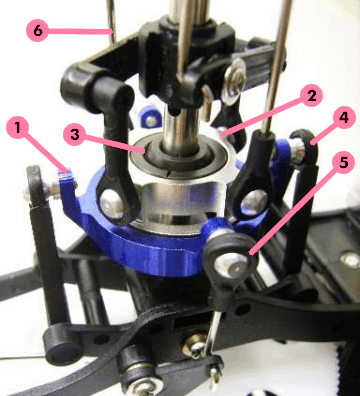
Swash plates increase the pitch of the retreating blade and decrease the pitch of the attacking blade.
Quadcopter’s have relatively short fan like fixed blades that don’t have the same efficiencies and they are almost certainly never at an optimum pitch for forward flight and they use a lot of power to remain stable.
However they are very simple and cheap to make and maintain.
The helicopter rotor blade & gearbox assembly is a complex piece of engineering and very expensive to build & maintain with precise tolerances and is probably not suitable for mass deployment and operation with the level of aircraft maintenance capabilities of drone operators (thousands of aircraft engineers are not just going to spring out from nowhere).
For longer range fixed wing drones make sense for a whole variety of reasons but I think for stability and safety in close range the Quadcopter wins hands down.
However the problem with a Quadcopter is that its nice stable system requires independently controlled electric motors on each corner which means it needs to be powered by a decent battery.
A few people have asked me why you can’t use Petrol power-plants on a quadcopter?

Technically you could but you would require either one petrol engine per corner or some sort of computer controlled central differential with drive shafts and a 90 degree gearbox on each end.
The weight and complexity would kill its efficiency and you would imagine the constant acceleration & deceleration using long shafts would affect response and stability as well as increasing maintenance and engineering/design requirements.
For longer range fixed wing drones that wish to carry decent payloads with the redundancy of multiple power-plants, at $2500-6000 each small Gas Turbines are cost prohibitive, the only current alternative is to use multiple small petrol powered engines.

If you have ever played with small two stroke engines the thought of getting more than one of them to work reliably at the same time on either a fixed wing or a quadcopter probably fills you with dread.
It’s definitely doable with four stroke but would require a sophisticated control and starting system.
So the problem with batteries as a power source for Quadcopter’s & Multi Engined Fixed Wing is multifaceted.
- First they are heavy and weight is the enemy of range & payload
- Second pound for pound it is not the most dense form of energy storage
- Third they still weigh the same when they are empty
- They can’t be easily or quickly refuelled without pulling them out of the aircraft and replacing them, definitely can’t be done in flight.
- Its not easy to add range, you effectively have to work out how to bolt another battery and wire it into the system.
Recently the organisers of the UAV Challenge (one of the best UAV competitions in the world) released the new 2016 challenge after five team achieved the challenge, previously no one had been able to achieve the goal.
The new challenge pretty well sums up the issue above.
- Fly 20-30 km autonomously to the location (which probably rules most battery-powered quadcopter’s out)
- Hover or land in a clearing (which rules out fixed wing)
- Retrieve a package
- Fly back again
- Time limit 1 hr
- Total distance 70+ km
The unwritten rule is that you need to be ready to stay aloft for 1.5-2 hours as it is entirely possible that you will be put into a traffic holding pattern as you are using a public airfield and take off and landing priority is given to the real aircraft. (this happened to the Colombian’s and a few others at the last competition and contributed to their failure to complete the mission).
This probably means that your standard quadcopter is not going to make it without some means of radically extending its range.
Possible Solution’s
If Quadcopter’s and other Electrically powered aircraft want extended range then the solution is probably some form of Hybrid Petrol or Diesel Powered Generator with small battery for buffering charge and storing excess charge.
The Engine could be started, the battery charged for 5-10 minutes range and then the engine shutdown and restarted when the charge dropped to a certain level. The generator device if correctly engineered could double as the starter motor drawing from the same battery it charges.
This concept has been used for ever with diesel-electric trains and more recently hybrid cars.
A comment was made about the extra engine & generator weight reducing the payload and this is a reasonable observation however most quadcopter’s have a massive power to weight ratio, well above those seen in normal aircraft and can pull extreme G forces, so arguably most don’t have a problem with take off weight and the fuel load decreases as it is used, thereby becoming more efficient as the fuel is used.
The aircraft would be very easily refuelled on the ground and could possibly be refuelled in flight.
Gas turbines are a great reliable power source also and if coupled to a generator would provide a similar result however they are extremely complex and expensive, its hard to imagine these could be made in a way that would make them suitable for this role, however its worth considering what you could do to drop the cost of building a small gas turbine as this would probably be superior to a petrol engine.

I think the Petrol Powered Generator is a reasonably trivial engineering exercise, the trick is getting the petrol engine to reliably start and working out the size of the battery for buffering the charge.
Over to you entrepreneurial drone engineering enthusiasts.
Message me on Twitter if you have any comments @MikeNicholls88
Photo of Experimental Quadcopter from http://www.e-volo.com/
Pitch your Startup, App or Hardware or post a Startup Event or Startup Job